Factory Control
Human Tacit Knowledge for Robotic Learning
Methods for integrating expert know-how, demonstrations, and implicit operation rules into robotic learning and autonomous execution.
Tacit KnowledgeDemonstration LearningRobotic LearningHuman-in-the-loop AI
Tacit knowledge as learning signal
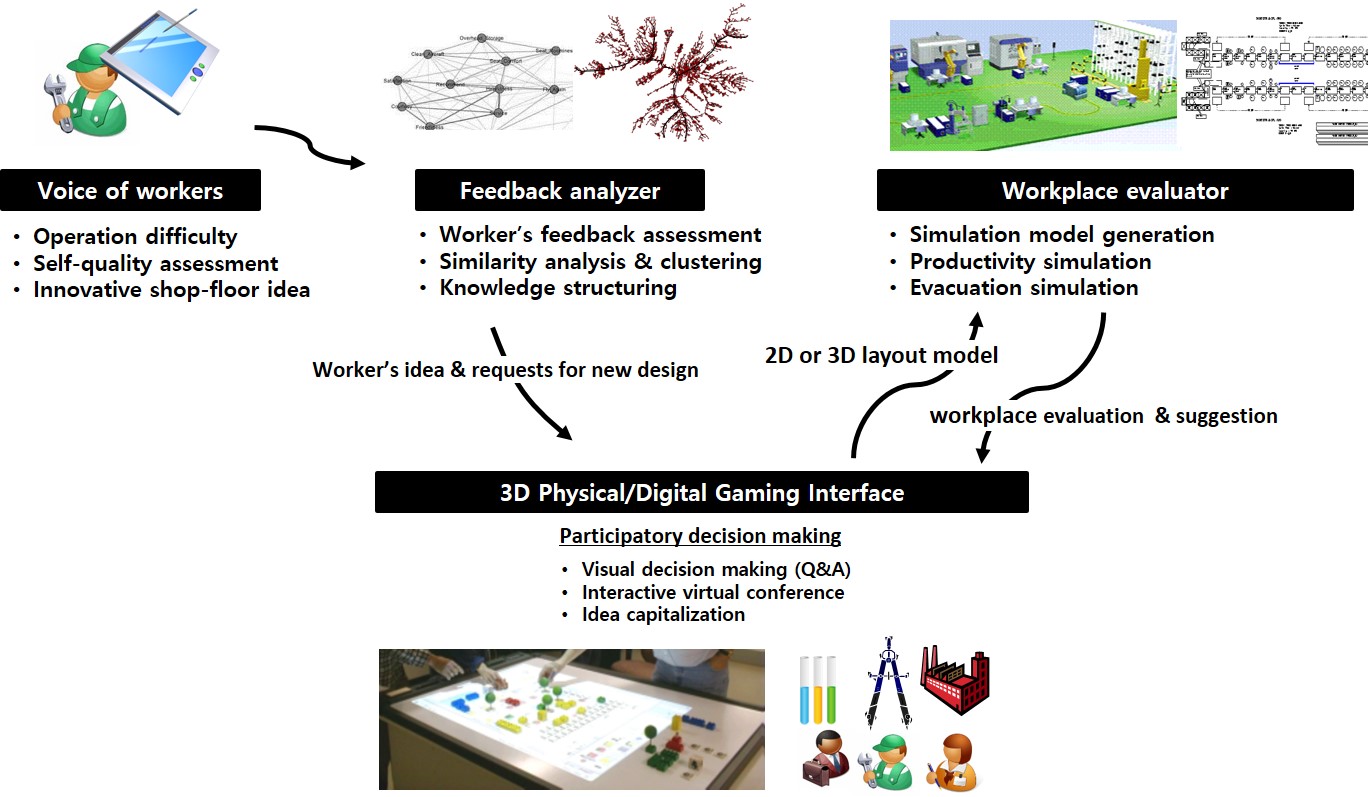
Experienced operators often know subtle handling rules, exception cases, and process tricks that are not written in formal manuals. We aim to capture such tacit knowledge as useful learning signals.
From demonstration to robotic policy
Human demonstrations, voice instructions, annotations, and operation traces can be translated into task constraints, preferred actions, and correction signals for robotic learning.
Human-in-the-loop autonomy
The goal is not to remove human expertise, but to make it reusable by AI agents and robots in autonomous workcell operation.